Sources and receivers
Defining the sources and receiver position is necessary for any seismic simulation or inversion problem. This notebook shows how to do so, and present the different functionalities allowed by SeisCL.
[1]:
import matplotlib.pyplot as plt
import numpy as np
from SeisCL import SeisCL
seis = SeisCL()
We explain these concepts with a very simple model to begin with. Let’s start by setting up the relevant constants of a simple 2D model.
[2]:
seis.N = np.array([200, 500])
seis.dt = dt = 0.25e-03
seis.dh = dh = 2
seis.NT = NT = 1500
model = {"vp": np.full(seis.N, 3500),
"rho": np.full(seis.N, 2000),
"vs": np.full(seis.N, 2000)}
Structure of the position arrays
In SeisCL, the sources and the receivers information is defined in two arrays src_pos_all and rec_pos_all which are of length [ 5 x number of sources ] and [ 8 x number of receivers ]. Each entry in the source array must have the elements [sx, sy, sz, srcid, src_type]
Src_pos_all input |
Description |
|---|---|
sx |
Position of the receiver in X |
sy |
Position of the receiver in Y |
sz |
Position of the receiver in Z |
srcid |
Source ID : Each receiver is associated with one source ID Same ID are fired simultaneously |
src_type |
Type of the source : \(\hspace{0.1cm}\) 0 : Force in X \(\hspace{3cm}\) 1 : Force in Y \(\hspace{3cm}\) 2 : Force in Z \(\hspace{2.6cm}\) 100 : Explosive |
As can be seen, SeisCL supports two different types of sources with the entry src_type, an explosive source (or pressure source), and a directed force. Note that two sources with the same srcid will be fired simultaneously.
In the following, we define a single shot position.
[3]:
Nz = seis.csts['N'][0]
Nx = seis.csts['N'][1]
sx = seis.N[1] // 2 * dh
sy = 0
sz = seis.N[0] // 2 * dh
srcid = 0
src_type = 100
seis.src_pos_all = np.stack([[sx], [sy], [sz], [srcid], [src_type]], axis=0)
Each entry in the receiver array must have the elements [gx, gy, gz, srcid, recid, **, **, __]
Rec_pos_all input |
Description |
|---|---|
gx |
Position of the source in X |
gy |
Position of the source in Y |
gz |
Position of the source in Z |
srcid |
Id of the source related to this receiver |
recid |
Trace number |
– |
Blank |
– |
Blank |
– |
Blank |
It is important to understand that the receivers for each source must appear in rec_pos_all, even if they are located at the same position. That is why the srcid is necessary. This allows to have different receiver configuration for each source.
Note also the recid field. This must be unique for each receiver, and begin at 1 for the first receiver. Why is this needed ? This is related to the _all in src_pos_all and rec_pos_all. Suppose that you have a very large survey, but that you only want to compute the gradient for a small subset of the dataset. To do so, you can select only the desired srcid, and pass that to SeisCL. However, when computing the gradient, it is convenient to keep the trace number of the traces
we need to read in the observed data file. That is the purpose of the recid field: it thus of utmost importance that it is unique for each trace and starts at 1 for the first trace in the file. Hence, the arrays src_pos_all and rec_pos_all should contain all sources and receiver positions of the survey.
Let’s define the receiver on top of the model.
[4]:
gx = np.arange(seis.nab + 10, seis.N[1] - seis.nab -10, 5) * dh
gy = gx * 0
gz = gx * 0 + (seis.nab + 10) * dh
gsid = gx*0
recid = np.arange(0, len(gx)) + 1
blank = gx*0
seis.rec_pos_all = np.stack([gx, gy, gz, gsid, recid, blank, blank, blank], axis=0)
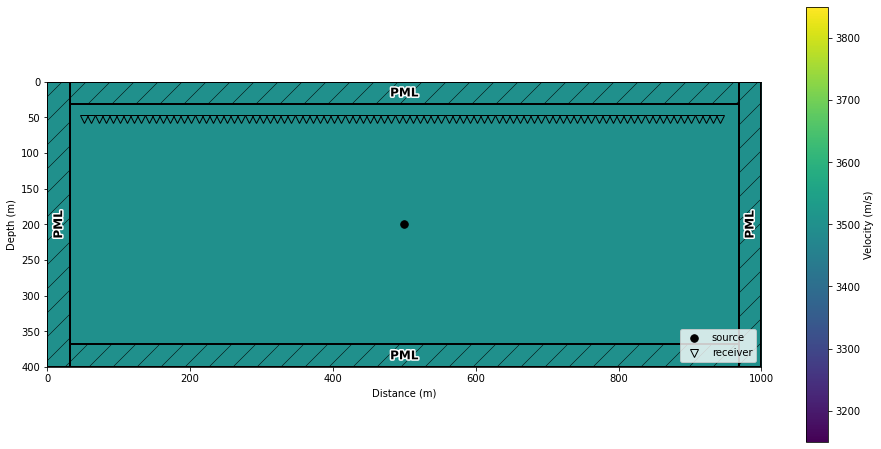
Let’s vizualize the source and receiver positions.
[5]:
_, ax = plt.subplots(1, 1, figsize = (16,8))
seis.DrawDomain2D(model['vp'], ax = ax, showsrcrec = True, showabs = True)
Defining the source signature
Once sources positions are defined, we need to define the source signature of each source. The array SeisCL.src_all contains the sources signature and has the format [NT X nb_srcs]. If not defined, SeisCL will fill thay array automatically, with a Ricker wavelet with a central frequency of seis.f0. For now, the attribute SeisCL.src_all is empty:
[6]:
print(seis.src_all)
None
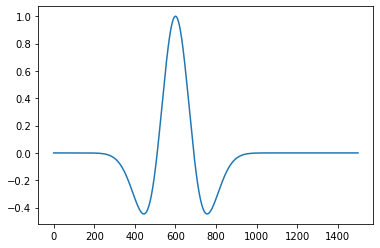
Upon calling SeisCL.set_forward, the src signature is filled up with a Ricker Wavelet
[7]:
seis.set_forward([0], model, withgrad=False)
plt.plot(seis.src_all)
plt.show()

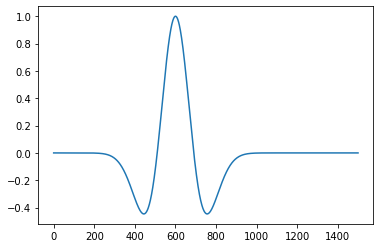
If another source function is needed, we can always redefine src_all to whatever we would like.
[8]:
seis.src_all[:, 0] = seis.ricker_wavelet(f0=seis.f0/1.5)
plt.plot(seis.src_all)
plt.show()
Once src_all is defined, the SeisCL.set_forward method does not overwrite it:
[9]:
seis.set_forward([0], model, withgrad=False)
plt.plot(seis.src_all)
plt.show()
## Performing the simulation
We now have everything we need, so we can run the simulation and show the result.
[10]:
seis.seisout = 2
seis.set_forward([0], model, withgrad=False)
seis.execute()
data = seis.read_data()[0]
[11]:
fig, ax = plt.subplots(1, 1, figsize=[8, 5])
extent = [seis.rec_pos_all[0,0], seis.rec_pos_all[0,-1], seis.NT*dt, 0]
clip = 0.1
vmax = np.max(data) * clip
vmin = -vmax
ax.imshow(data, aspect='auto', vmax=vmax, vmin=vmin,
extent=extent, interpolation='bilinear',
cmap=plt.get_cmap('Greys'))
ax.set_title("Pressure", fontsize=14, fontweight='bold')
ax.set_xlabel("Position of geophone (m)")
ax.set_ylabel("Time (ms)")
plt.show()

Chosing the ouput type
The receivers can record different types of measurements, like pressure to simulate hydrophones, or particle velocities to simulate geophones. The type of measurements is controlled by a global parameter, SeisCL.seisout. The possible values are:
1: output velocities,
2: output pressure,
3: output stresses and velocities
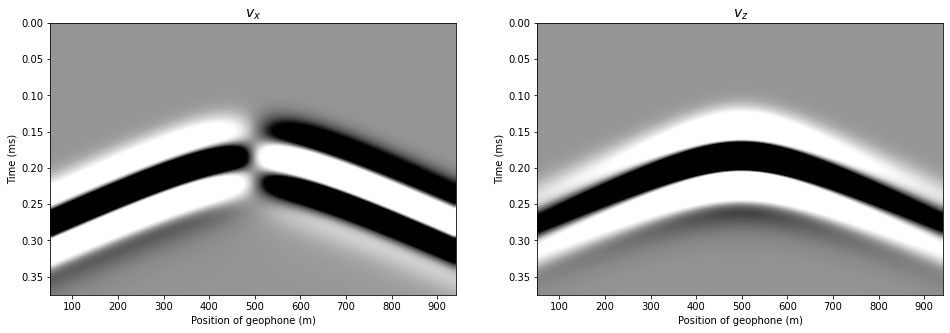
We can perform the previous computation, this time outputing the velocities.
[12]:
seis.seisout = 1
seis.set_forward([0], model, withgrad=False)
seis.execute()
data = seis.read_data()
This time, the output of SeisCL.read_data is a list with two elements, particle velocities in x and z.
[13]:
fig, axs = plt.subplots(1, 2, figsize=[16, 5])
extent = [seis.rec_pos_all[0,0], seis.rec_pos_all[0,-1], seis.NT*dt, 0]
clip = 0.1
vmax = np.max(data) * clip
vmin = -vmax
axs[0].imshow(data[0], aspect='auto', vmax=vmax, vmin=vmin,
extent=extent, interpolation='bilinear',
cmap=plt.get_cmap('Greys'))
axs[1].imshow(data[1], aspect='auto', vmax=vmax, vmin=vmin,
extent=extent, interpolation='bilinear',
cmap=plt.get_cmap('Greys'))
axs[0].set_title("$v_x$", fontsize=14, fontweight='bold')
axs[0].set_xlabel("Position of geophone (m)")
axs[0].set_ylabel("Time (ms)")
axs[1].set_title("$v_z$", fontsize=14, fontweight='bold')
axs[1].set_xlabel("Position of geophone (m)")
axs[1].set_ylabel("Time (ms)")
plt.show()
Computing a selection over multiple shots
For now, we have only shown examples with one shot position. Let’s now show how to have multiple shots, and compute only a subsample of them. This can be useful for stochastic optimization, as shown by Fabien-Ouellet et al. ( 2017).
Let’s define 4 shot positions.
[14]:
seis.seisout = 2
seis.src_pos_all = np.empty((5, 0))
seis.rec_pos_all = np.empty((8, 0))
seis.src_all = None
sx = np.array([100, 200, 300, 400]) * dh
sy = sx * 0
sz = sx * 0 + Nz // 2 * dh
srcid = np.arange(0, len(sx))
src_type = sx * 0 + 100
seis.src_pos_all = np.stack([sx, sy, sz, srcid, src_type], axis=0)
print(seis.src_pos_all)
[[200 400 600 800]
[ 0 0 0 0]
[200 200 200 200]
[ 0 1 2 3]
[100 100 100 100]]
Let’s reuse the same receiver position as the previous example. In this case, we have to repeat them for each shot.
[15]:
gx4 = np.tile(gx, len(sx))
gy4 = np.tile(gy, len(sy))
gz4 = np.tile(gz, len(sz))
gsid4 = np.concatenate([gsid + ii for ii in range(len(sx))])
recid4 = np.arange(0, len(gx4)) + 1
blank4 = np.tile(blank, len(sx))
seis.rec_pos_all = np.stack([gx4, gy4, gz4, gsid4, recid4,
blank4, blank4, blank4], axis=0)
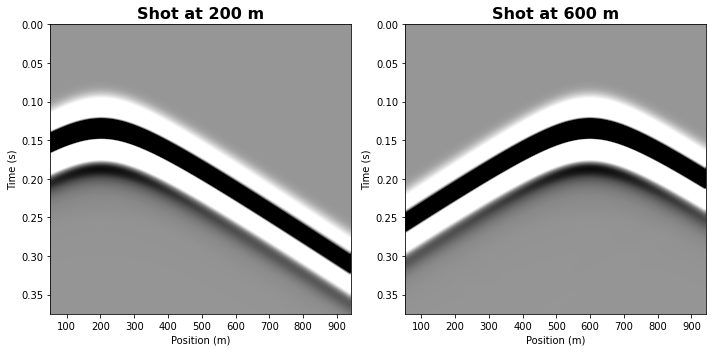
Say we want to only compute shots 0 and 2. We can easily do that by passing that information to set_forward
[16]:
seis.set_forward([0, 2], model, withgrad=False)
seis.execute()
data = seis.read_data()[0]
Note that data shape is [NT X ntraces], which means that all traces of all shots are concatenated in the same array. Let’s resort according to the shot position.
[17]:
data = np.reshape(data, [data.shape[0], -1, data.shape[1]//2])
[18]:
fig2 = plt.figure(figsize = (10,5))
ax2 = []
extent = [seis.rec_pos_all[0,0], seis.rec_pos_all[0, -1], seis.NT*dt, 0]
clip = 0.1
vmax = np.max(data) * clip
vmin = -vmax
for idx, shot in enumerate([0, 2]):
ax2.append(fig2.add_subplot(1,2,idx+1))
ax2[idx].imshow(data[:, idx, :], aspect='auto', vmax=vmax, vmin=vmin,
extent=extent, interpolation='bilinear',
cmap=plt.get_cmap('Greys'))
ax2[idx].set_title('Shot at ' + str(sx[shot]) + ' m',
fontsize=16, fontweight='bold')
ax2[idx].set_xlabel("Position (m)")
ax2[idx].set_ylabel("Time (s)")
plt.tight_layout()
plt.show()
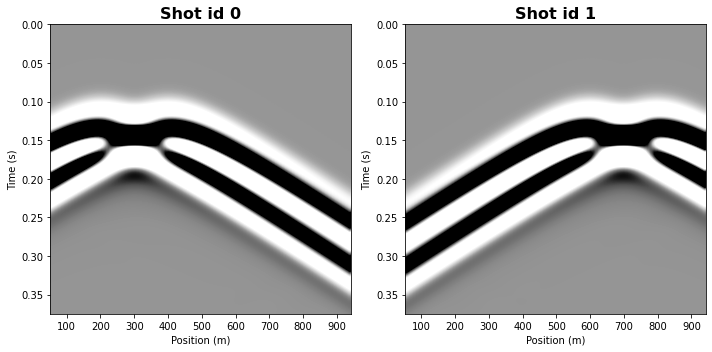
Simultaneous shots
SeisCL also allows firing simultaneuously different shots. In fact, all shots sharing the same srcid are fired at the same time.
Let’s show that by redefining the source array.
[19]:
seis.src_pos_all[3, 1] = 0
seis.src_pos_all[3, 2] = 1
seis.src_pos_all[3, 3] = 1
print(seis.src_pos_all)
[[200 400 600 800]
[ 0 0 0 0]
[200 200 200 200]
[ 0 0 1 1]
[100 100 100 100]]
Similarly, we redefine the receiver positions.
[20]:
gx2 = np.tile(gx, 2)
gy2 = np.tile(gy, 2)
gz2 = np.tile(gz, 2)
gsid2 = np.concatenate([gsid + ii for ii in range(2)])
recid2 = np.arange(0, len(gx2)) + 1
blank2 = np.tile(blank, 2)
seis.rec_pos_all = np.stack([gx2, gy2, gz2, gsid2, recid2, blank2, blank2, blank2], axis=0)
We then compute the shots for the srcids 0 and 1.
[21]:
seis.set_forward([0, 1], model, withgrad=False)
seis.execute()
data = seis.read_data()[0]
Two acquisitons have been simulated, with two sources per acquisitions.
[22]:
data = np.reshape(data, [data.shape[0], -1, data.shape[1]//2])
fig2 = plt.figure(figsize = (10,5))
ax2 = []
extent = [seis.rec_pos_all[0,0], seis.rec_pos_all[0, -1], seis.NT*dt, 0]
clip = 0.1
vmax = np.max(data) * clip
vmin = -vmax
for idx, shot in enumerate([0, 1]):
ax2.append(fig2.add_subplot(1,2,idx+1))
ax2[idx].imshow(data[:, idx, :], aspect='auto', vmax=vmax, vmin=vmin,
extent=extent, interpolation='bilinear',
cmap=plt.get_cmap('Greys'))
ax2[idx].set_title('Shot id ' + str(shot),
fontsize=16, fontweight='bold')
ax2[idx].set_xlabel("Position (m)")
ax2[idx].set_ylabel("Time (s)")
plt.tight_layout()
plt.show()